About the project
Check out our progress
Our research focuses on the development of advanced robotic systems capable of autonomous navigation and interaction within dynamic environments. Key areas of investigation include:
- computer vision techniques
- machine learning models for decision making
- precision control algorithms

Setup for testing and calibrating the robotic drill system.

Experimental setup.
The robotic drill system is designed to perform precise drilling operations in challenging environments. It incorporates advanced sensor systems and adaptive control mechanisms to ensure optimal performance.
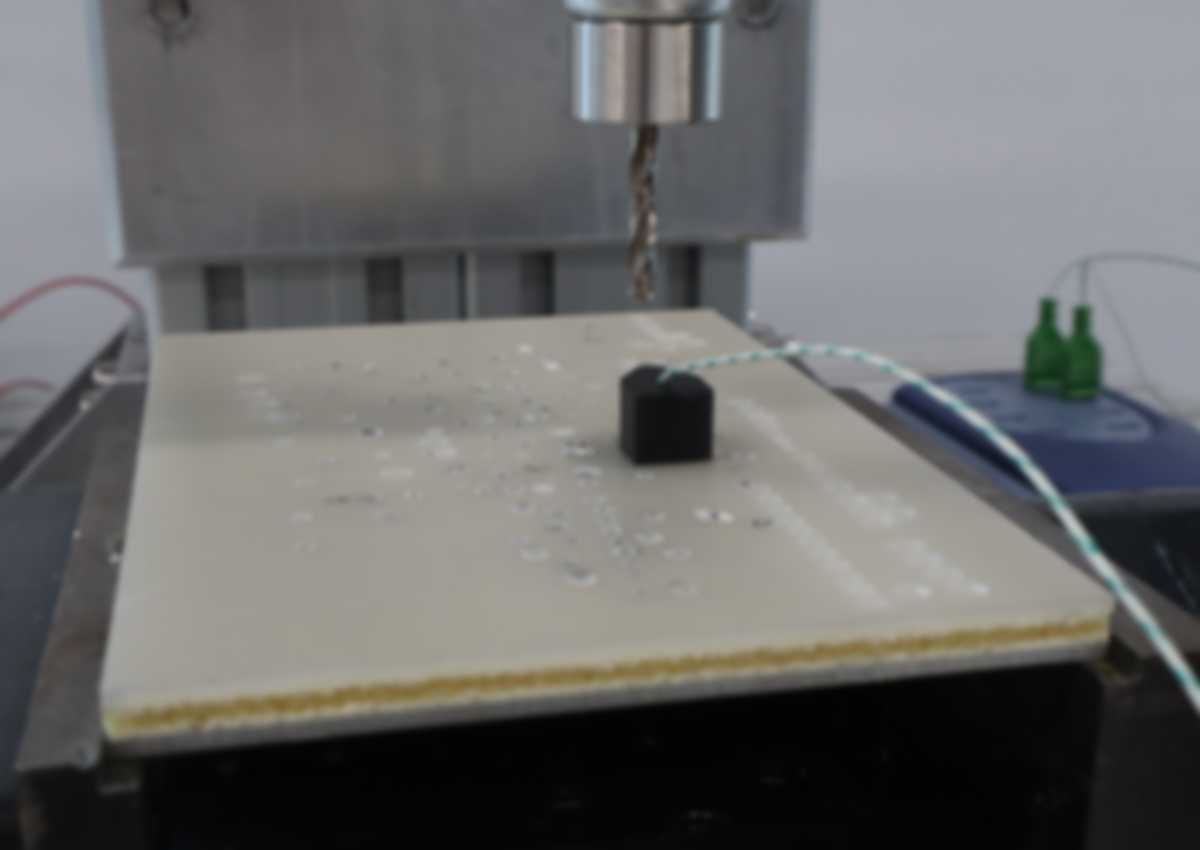
Drill system setup.
The project aims to develop a bone drill that will increase safety and precision compared to conventional drilling procedures. The drill uses a two-axis setup where one axis is the rotation of the drill, and the other is the axial movement of the drill. The rotational axis uses velocity control where the optimal rpm is determined experimentally. The axial movement is controlled through axial force control, and the optimal force is also determined experimentally, the control loop is closed using an integrated force sensor.
FF Control (Feedforward + PID)
For better control, a feedforward signal is generated from the bone density profile along the drilling trajectory that is precomputed from the CT scan of the skull. This way we can indirectly limit the bone temperature and stop bone necrosis from emerging. To prevent brain damage from the drilling procedure, a multi-layer safety stopping mechanism is implemented. From the CT scan of the skull the skull thickness at the drilling point will be determined, and that distance is used as the final safety stop. This distance will be increased by a predefined value to ensure full drill passthrough.
The system integrates advanced feedforward (FF) control with conventional PID regulation to achieve high-precision force control during cranial drilling. The feedforward component leverages preoperative CT data to estimate bone density and structural variations along the drilling trajectory. By anticipating these variations, the controller minimizes transient force deviations and improves responsiveness. Combined with PID feedback, this approach ensures stable drilling forces, reducing thermal load and lowering the risk of tissue damage.
Multi-Factor Stopping Mechanism
Safety is ensured through a robust, multi-factor stopping mechanism designed to prevent unintended penetration beyond the cranial bone. The primary detection method relies on monitoring the derivative of drilling force to identify breakthrough events in real time. This is complemented by redundant safeguards, including absolute force thresholds and bone thickness limits derived from CT data. This layered architecture guarantees reliable system response even in edge cases, significantly enhancing procedural safety.
PID Control with Adaptive Parameters
The system employs PID force control with adaptive parameter tuning based on drill diameter and drill sharpness. These factors directly influence cutting dynamics and force response, and adjusting control parameters accordingly ensures consistent performance across varying conditions. This adaptability improves control accuracy, maintains optimal force levels, and contributes to safer and more efficient drilling by compensating for tool wear and geometric differences.
Novelties
Robotic Integration with Full Procedure Execution
A key innovation of the system is its integration with a robotic arm capable of executing the complete drilling procedure autonomously. This includes handling multiple drilling points (e.g., multiple cranial holes) within a single workflow. The system performs trajectory execution, automatic alignment, and collision checking, ensuring safe approach paths and precise positioning. This transforms the setup from a laboratory prototype into a scalable, clinically relevant solution with enhanced repeatability, safety, and operational efficiency.
The AI system integrates various technologies to enable real-time decision making and adaptive responses. It leverages machine learning algorithms and sensor data to interpret the environment and execute tasks autonomously.
Procedure Planning
The program provides an interactive environment for planning patient-specific drilling procedures using CT/DICOM data. It enables visualization of anatomical structures in synchronized axial, sagittal, coronal, and 3D views, while allowing the user to manually define a drilling trajectory through entry and target point selection. Adjustable drill parameters, including diameter and angle, support flexible planning, while trajectory overlays and coordinate-based input aid in precise positioning. Additional tools such as surface visualization, drill corridor display, and multiplanar navigation assist the user in assessing the feasibility and safety of the planned path.
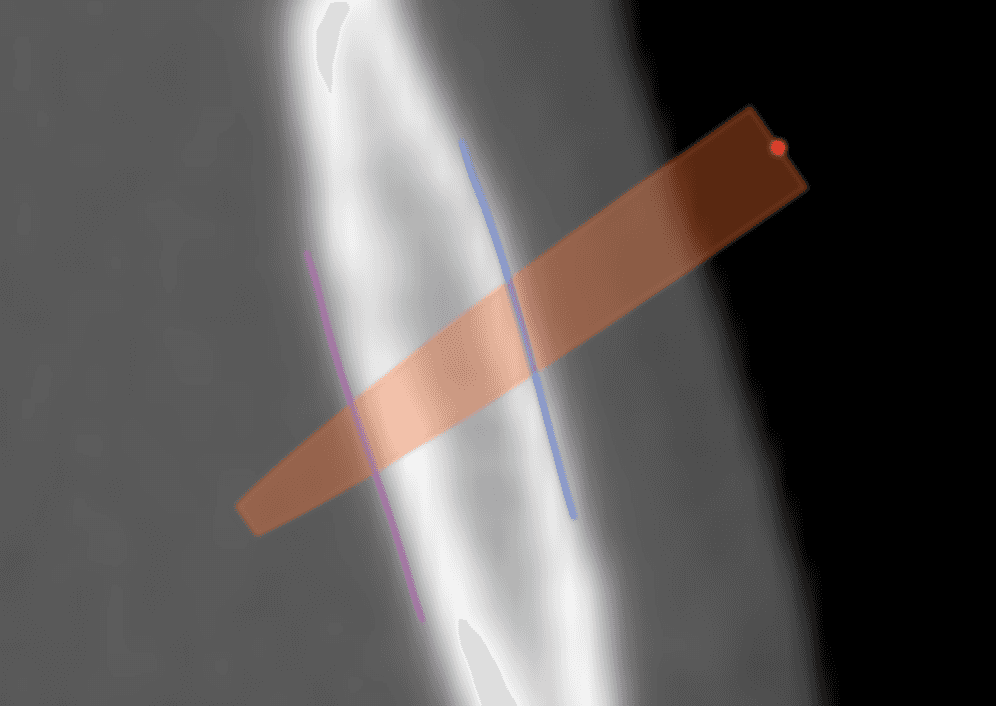
Procedure planning.
Quantitative Analysis and Results
Based on the defined trajectory, the program performs quantitative analysis of the drilling path by sampling CT intensity values along and around the drill axis. From this data, it computes density profiles, estimates bone boundaries, and determines drilling depth or bone thickness along the selected path. Results can be visualized through plots, displayed as overlays within the imaging views, and exported for further analysis. Together, these features provide both geometric and density-related information intended to support preoperative assessment and guide robotic drilling procedures.

Graph showing cylinder line profiles.
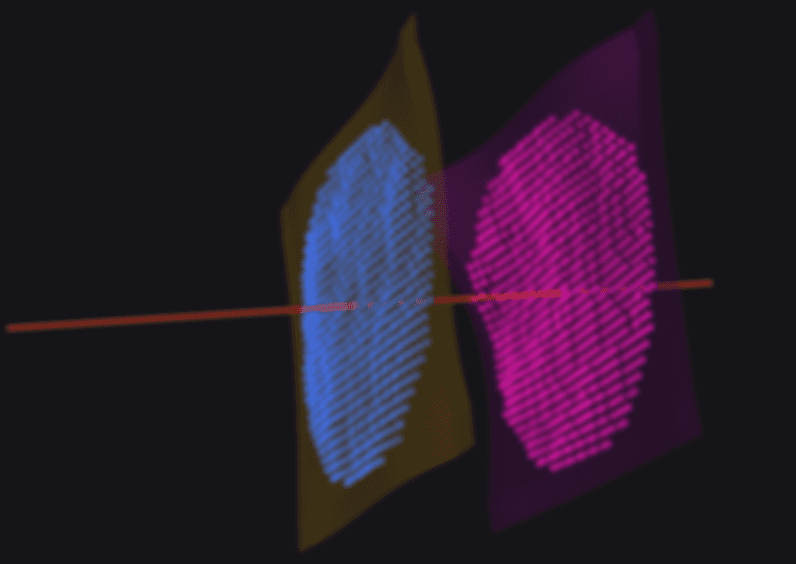
Skull surfaces visualization.

Density profile computation.
