Paper Submitted for Review - ERAS Conference 2026
We are pleased to announce that we have submitted a research paper for review to the IEEE Engineering Reliable Autonomous Systems (ERAS) Conference, hosted at the Faculty of Electrical Engineering and Computing (FER).
The submission is part of our ongoing work in the field of autonomous surgical systems. The paper focuses on advancing safety and control in critical neurosurgical procedures through sensor-based and control-oriented approaches.

ERAS conference is held at FER in May of 2026.
About the paper
“Towards Autonomous Robotic Cranial Bone Drilling”
The paper addresses safety and precision challenges in neurosurgical procedures, with a focus on cranial bone drilling. This procedure is highly sensitive, as even small deviations can result in serious complications.
In this work, we present a sensorized surgical drilling device that integrates real-time sensing, closed-loop force control, and breakthrough detection. The system also incorporates a multi-layer safety architecture to ensure reliable operation.
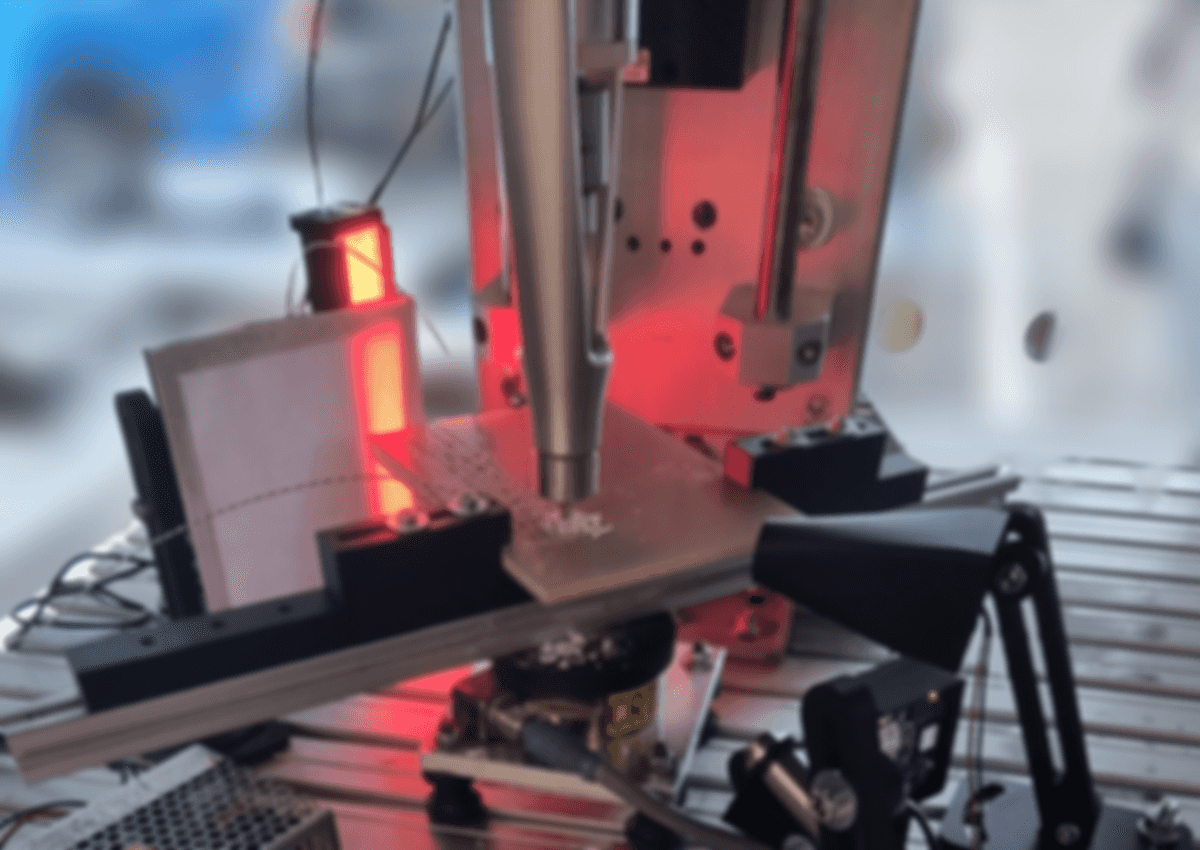
Experimental setup consisting of an artificial bone and the drill.
Key contributions
The main contributions of this work include the development of an integrated drilling system that combines sensing, control, and safety mechanisms within a unified framework. The proposed system enables coordinated operation based on real-time feedback and predictive information. The study also demonstrates stable force regulation and reliable detection of critical drilling events through experimental validation.
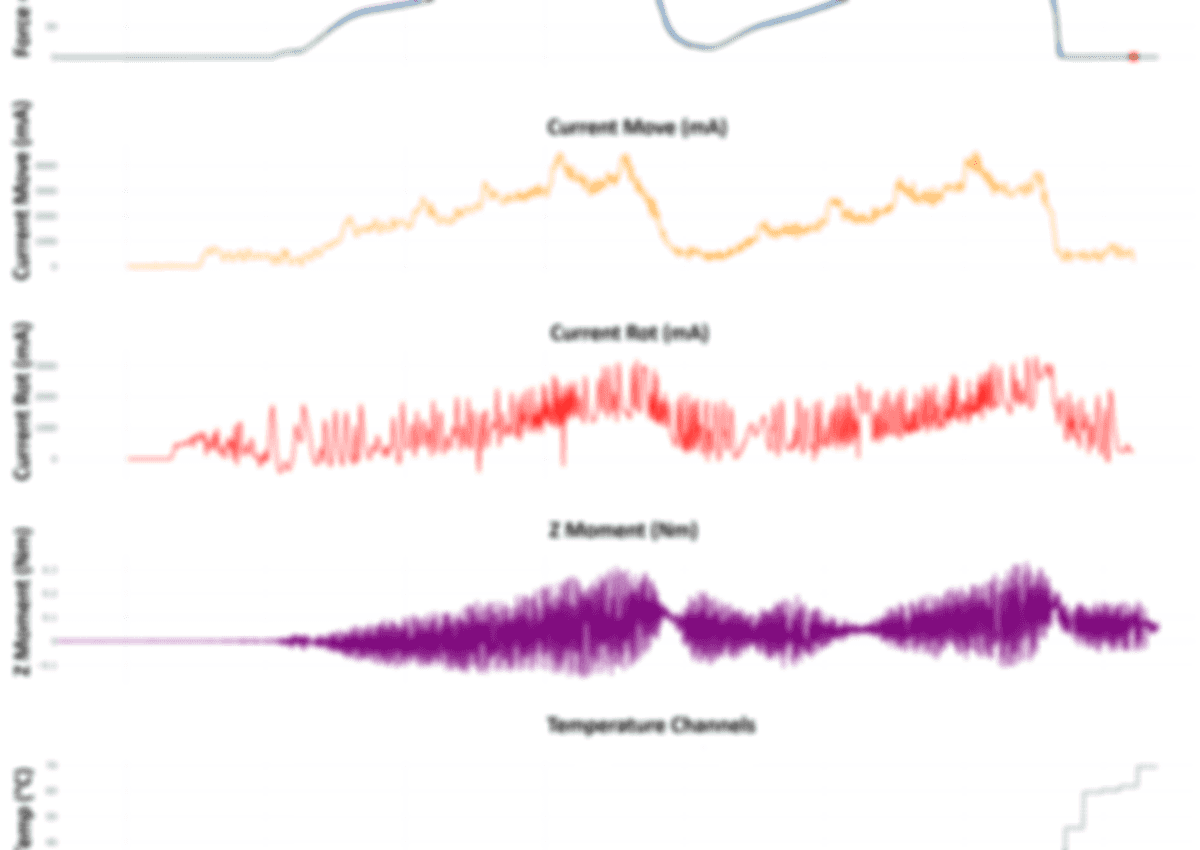
Measurements show temparature and force indicators, as well as movement information.
